
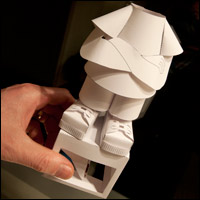
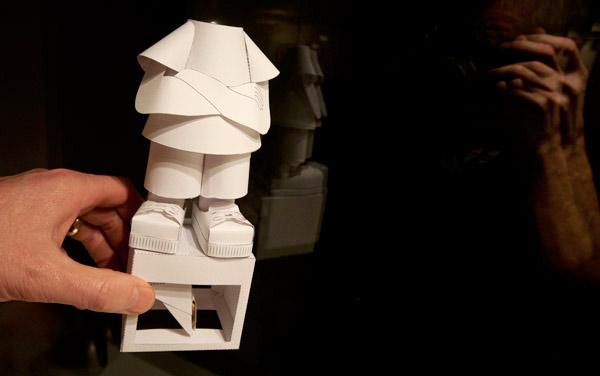
I've settled on using the single action pendulum, the movement seems the most realistic. I'm sure that the double action mech will come up in a future model. After a few design blind alleys I've arrived a set of legs and body that I'm happy with. (and I'm aware that sounds a little pervy/sinister) I've used thin legs so that there is plenty of clearance for the tapping foot to move. I need to find a better way to join the legs to the shorts, they're just sort of wedged at the moment. To complete the project I'll be adding a poseable head that should keep me busy tomorrow.
