

Factory robots use arms with many joints to that they can reach into awkward places. Each axis on each joint counts as one degree of freedom so, for example, a joint which rotates and moves up and down, like Surly Jack's head, has two degrees or freedom whereas an simple elbow type joint has only one. In the faerie model I'm aiming to create an arm with two joints and three degrees of freedom.
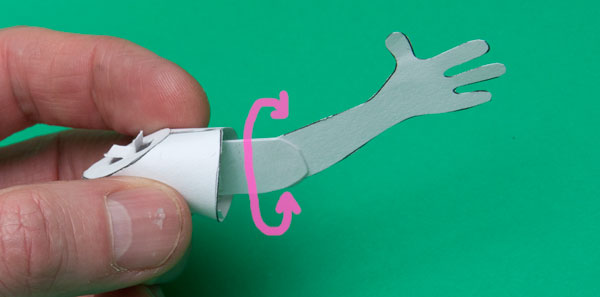
Degree one the upper arm rotates. This joint uses a couple of flat plates with the arm joined to one side. The long tabs in the picture will fix the plate into the shoulder.

The second degree of freedom is an elbow joint. Again, tabs in a circular hole.

Here, the arm is fitted into the shoulder showing the first degree of freedom.
For the final freedom, the shoulder swings back and forth.
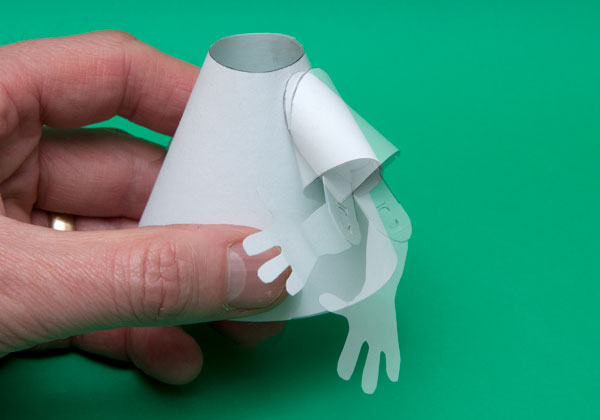
The prototype works nicely, time to incorporate it into the complete model.
