

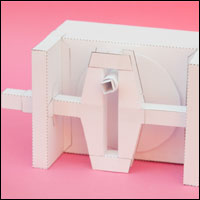
 You may remember the original scotch yoke mechanism. (Click the image to visit the post) In this model the rotating disk at the back of the model moved the sliding yoke side to side.
You may remember the original scotch yoke mechanism. (Click the image to visit the post) In this model the rotating disk at the back of the model moved the sliding yoke side to side.
I wanted to use this mech in my forthcoming exercising robot idea. My plan was to rotate the yoke by ninety degrees and use one of the drive pins to move the robot up and down. The problem was that the long drive shafts on either side of the yoke would have made the box that the robot stood on incredibly tall.
Here's my proposed solution. Rather than a drive shaft at each end of the yoke I've opted for a main drive shaft then a couple of side shafts to keep everything lined up. This keeps everything nice and compact but should work just as well as the original design.

I've slightly simplified the design of the rotating drive pin by getting rid of the rotating disk and replacing it with a pin in a bar connected to the main drive shaft and handle.
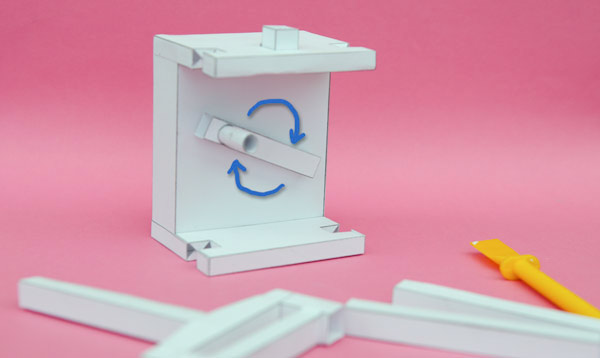
 By changing the distance the drive pin is from the rotating drive shaft I can control how much the character on top of the box moves up and down.
By changing the distance the drive pin is from the rotating drive shaft I can control how much the character on top of the box moves up and down.
 And to satisfy your curiosity, here's an eight frame stop motion animation of the mechanism in action. Notice the two vertical guide shafts on either side are moving all over the place – this is because I had only pushed them into place but didn't glue them just incase I wanted to take the model apart and make changes. The finished design will be much more sturdy!
And to satisfy your curiosity, here's an eight frame stop motion animation of the mechanism in action. Notice the two vertical guide shafts on either side are moving all over the place – this is because I had only pushed them into place but didn't glue them just incase I wanted to take the model apart and make changes. The finished design will be much more sturdy!
Apart from the slight wobbles, looking good I think!
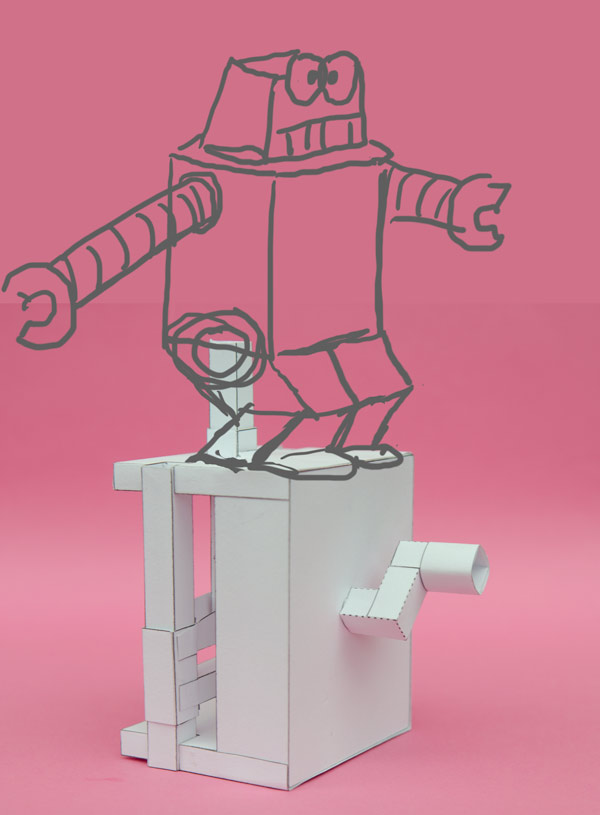
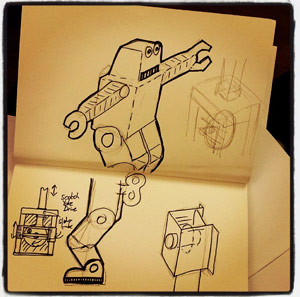 The original sketch from my note showing the winding key in place.
The original sketch from my note showing the winding key in place.
Originally posted on Instagram
