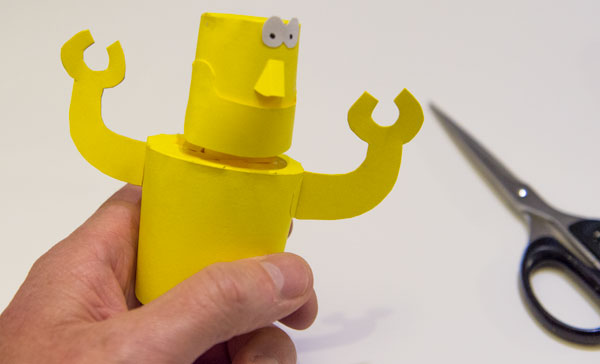
I’ve scanned in the penguin parts from the previous post and have them lined up ready to convert into a suitable digital format. I’m still mulling over the final details of the design so while I’m doing that I’ve made a start on the Contra-rating Robot idea. First step, I’ve put together this prototype for the head and body.
The inner axle fixes to the inside of the head…
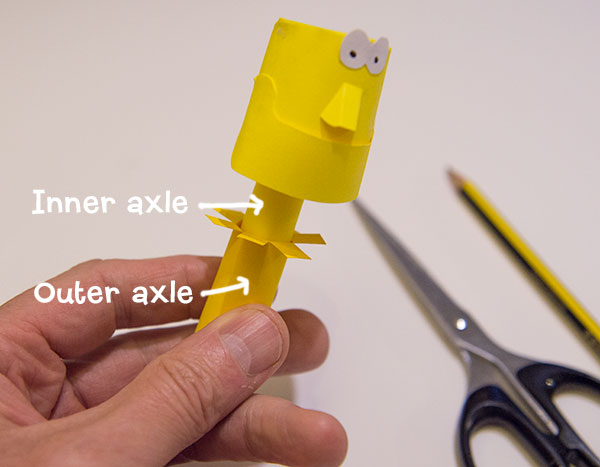
…the outer axle fixes to the body.
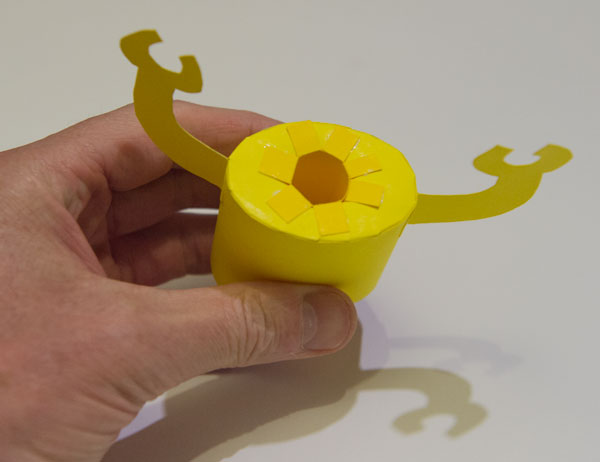
The finished robot will fit atop the Co-axial Drive Essential Mechanism with the head rotating one way and the body/arms rotating the other. I need to sort out the legs now, the tricky part is going to be fitting the two axles up through the box top and through the two legs. Should be fun 🙂