

The co-axial drive from Essential Mechanisms looks to be a promising starting point for a few different paper projects. I was planning on making the contra-rotating robot first but I’ve been distracted by Mr Cool and his fabulous mash-up with the Runaway Rabbit. I mentioned in a comment on the post that I might have a go at something similar myself but with sledging penguins instead of the rabbits in cars.
Here are my (very rough) sketches of what I had in mind. The idea is fairly straightforward. There is a large rotating disk connected to one axle. This moves the outer penguin round and round. The inner penguin is mounted on the other axle and turns on the spot in the other direction.
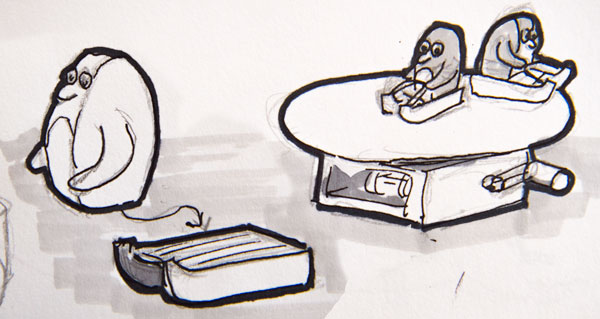
First step, design a penguin on a sledge. Presented here is my first freehand draft amde from coloured card. Next step, I’ll cut the model up and lay out the parts on my scanner then outline them in Illustrator making a set of printable parts.

