
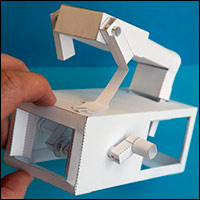
Exercise is good, so I'm told. But if you don't have time for it you can always create a paper avatar to do it for you. Hence the push-ups model I'm working on now. Soon I'll have the vicarious physique of a seven stone weakling.
So on to the mechanics! Sometimes with mechanisms the best way to create a movement is not to mirror reality. When I'm doing pushups (ha.) The muscles in my arms, chest and shoulders contract to lift my body from the ground. In this project I'm actually lifting the body via the feet.
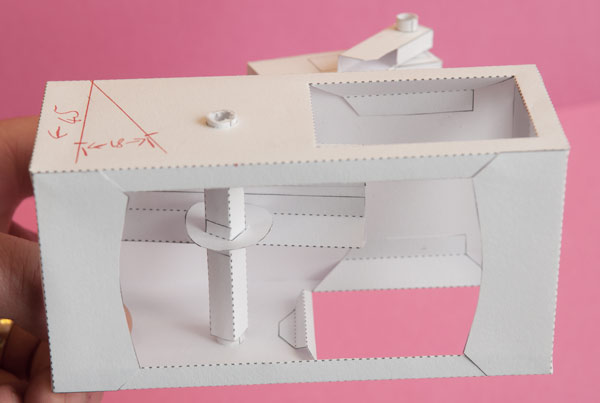
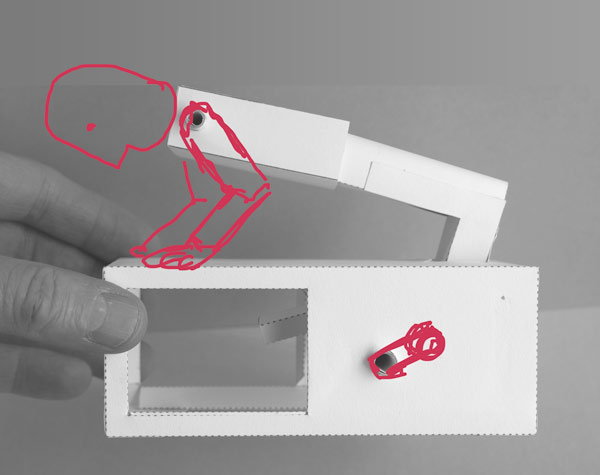
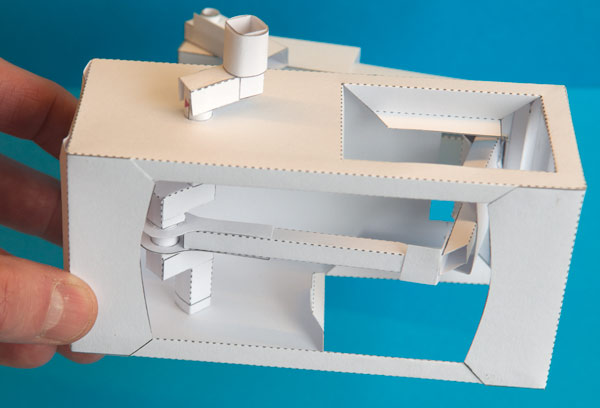
I see two main competing ways to achieve this, via a cam or using a crank. Cam first. I fitted a cam to a drive shaft and threaded it into the box. The cam rests against a cam follower linked directly to the feet. Turn the handle and the body lifts up and down.
It works reasonably well, the plus side of the cam is that you can create any movement profile you want within the limits of the cam follower. In this case I was able to add a little dwell at the top and bottom of the travel, a slight pause at each extreme of movement. The downside – there is always a downside – is that the movement is only driven up and relies on gravity for the return. Not a huge problem but it does give a slightly floaty feel to the movement.
The red writing on the side is where I measured up for fitting a crank.
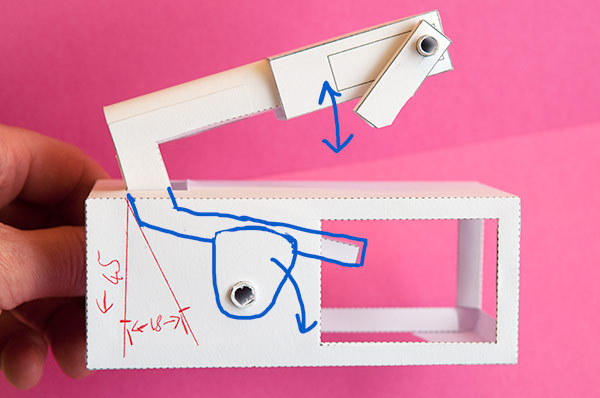
Onto the crank. I used the crank template I'd created in the recent crank slider project with the throw set to 9mm. Everything fitted together nicely, I simply needed to turn the box top round so that the feet were at the other end away from the drive handle.

Looking good! I must say I was surprised just how much more satisfying the movement is using a crank. Very positive in both direction and the lack of dwell doesn't seem to be a problem. Yep. I'm going with that.
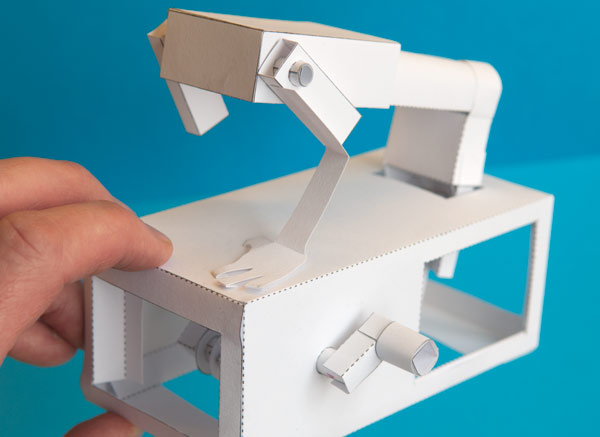
It'll look better with two arms and a head. I'm still not sure about the character though. Robot? Pirate? Gentleman in a top hat and tails? Hopefully inspiration will strike soon.
