The crank box mechanism is a promising starting point for making 3D printed automata. I already had this sledging penguin model for a paper project (more details here) so I’ve pressed it into service on this project. By fitting it to the top of the crank box I can get an idea of how a sledging penguin 3D printed model might work.

The penguin is fixed to the sledge via a hinge. A linkage connects to the box top and rocks it back and forth as the sledge moves. The resulting movement is similar way to the paper Runaway Rabbit model.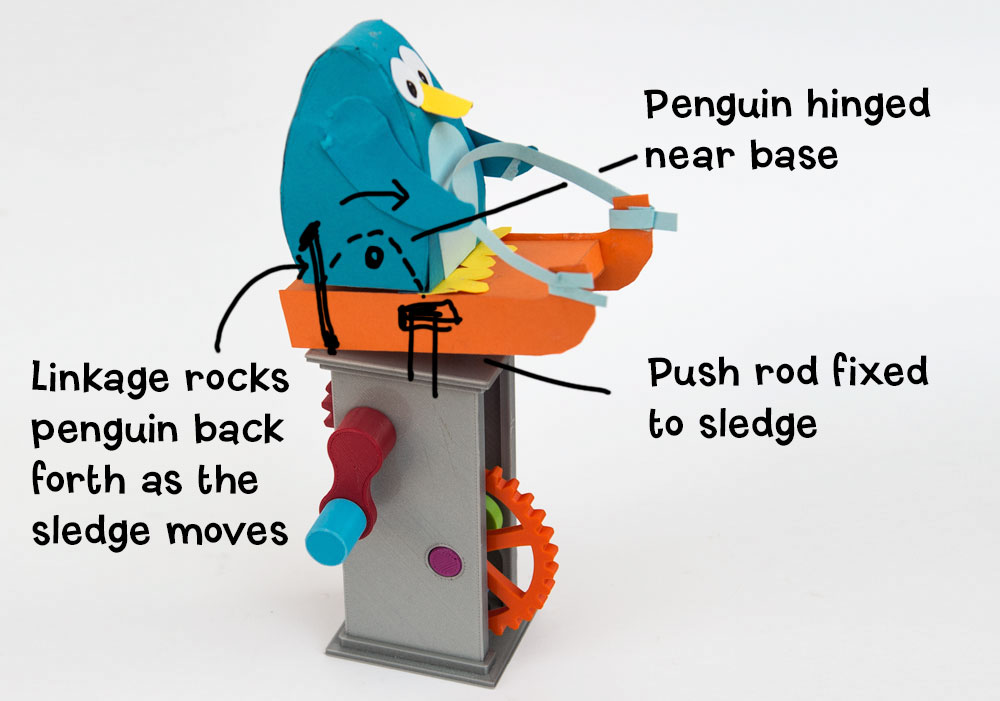
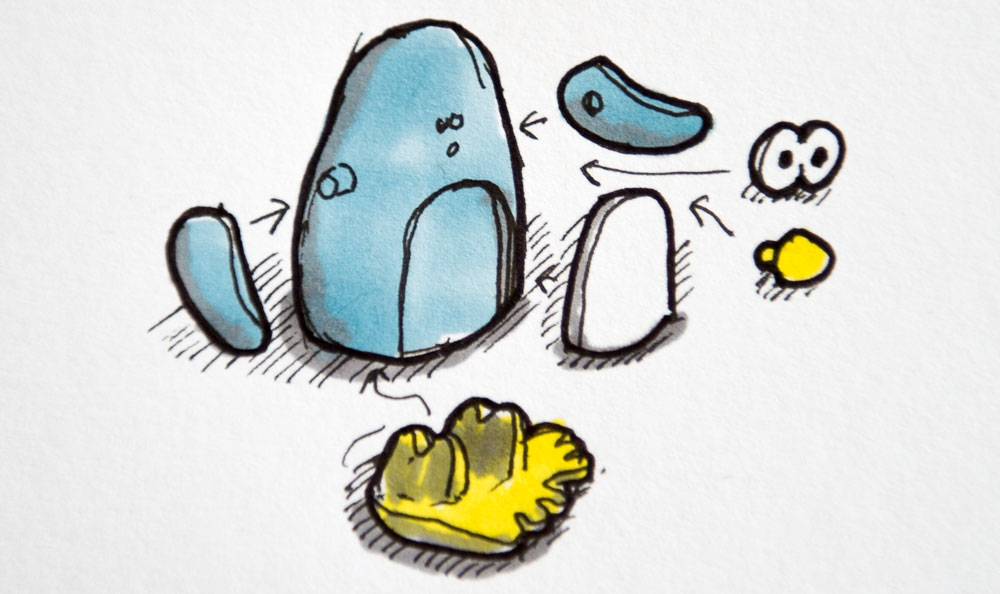
The mixed media model actually works quite well but I would prefer to make the whole thing as a 3D printed model. Here are my rough sketch for the part t that I’ll be recreating in Fusion 360. Should be fun!