
I've been thinking about a pose-able robot model for a while, it'll have bendy arms, mavable head, that sort of thing. I must have been thinking about it last night when I went to sleep because when I woke up this morning I had the claw all worked out. I know from experience that if I ignore these moments of lucidity they quickly evapourate so, just for today, I've set aside the escapement, my current main project, and spent the day putting together…. The Paper Claw!

I've made the file available for members to download for free in the usual place. Have fun!
Print the single parts sheet onto thin card. (230 micron / 230 gsm – is there a different US unit for thin card? I know how you like your imperial units) Score along the dotted lines and cut out the parts.
Fold up and glue together the main arm.
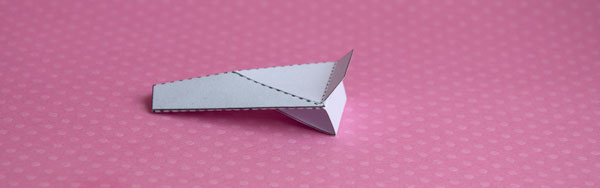
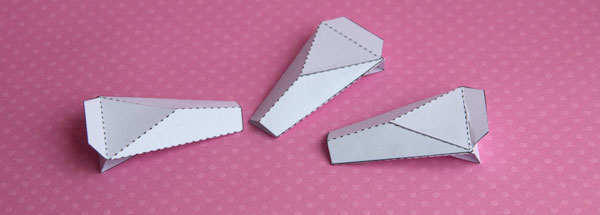
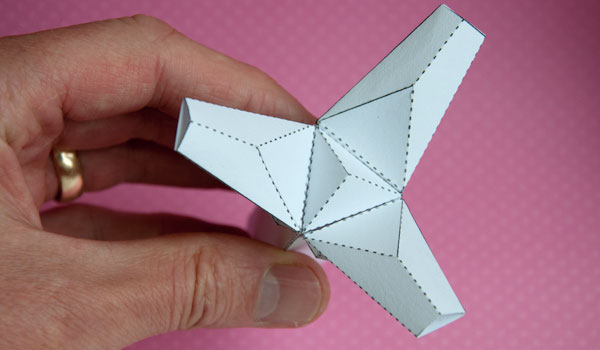
Assemble each of the three claw parts as shown above. Notice that the tab sticks out and the triangular section at the bottome is made from valley folds.
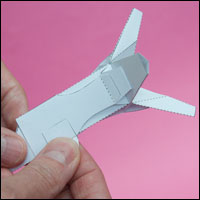
The three fingers completed.
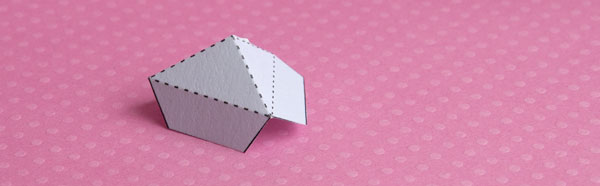
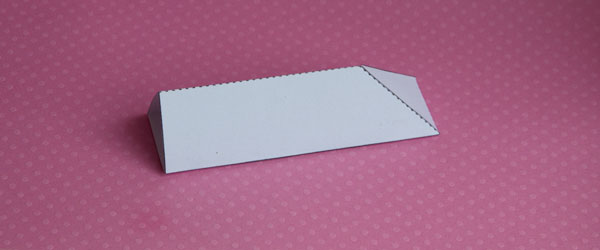
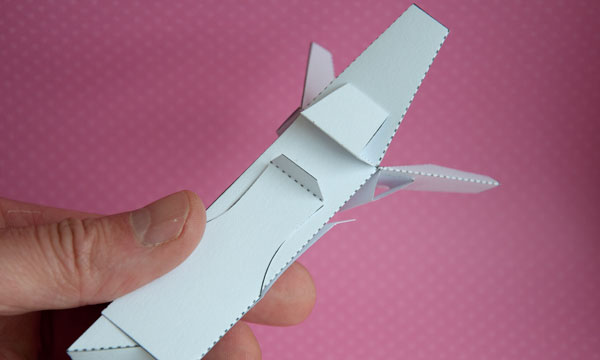
Make the triangular based pyramid. This will be the arm end cap.
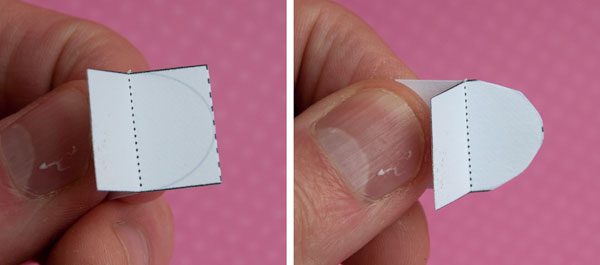
Fol round and glue the slider sleive.
Make up the handle as shown above.
Glue the tab on the first of the claws to the inside of the arm. Make sure that it is linied up accurately and is free to move back and forth.
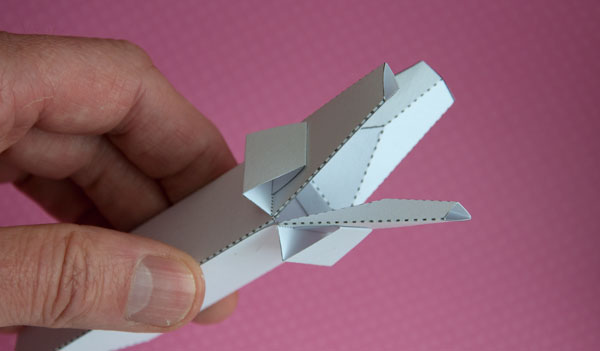
Repeat the process for the other two fingers.
Fit the end cap into place. Make sure that you don't press it in too far as it's really tricky to get out. (I know, I tried it)
Thread the slider sleave over the arm.
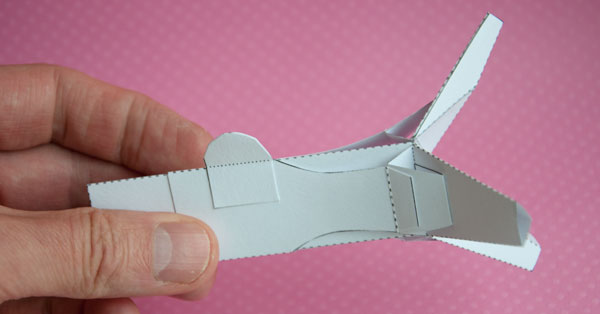
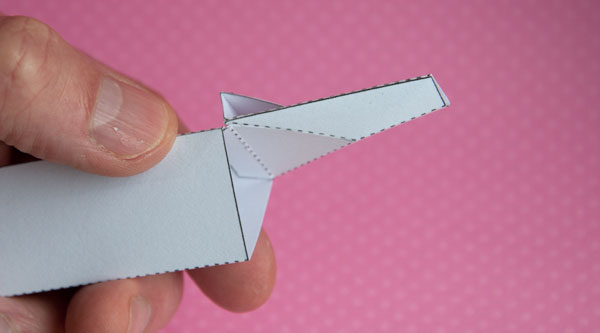
Complete the prototype by gluing the long tabs to the triangular sections on the fingers.
That's it. Go out and take over the worls with your paper claw!
Back to the escapement for me; perhaps a coffee first 🙂
