
No printer ink from the postman this morning. I've pressed the laser printer into service – it is not very good on card, I think the fuser isn't hot enough. Anyway – it did the job and has let me construct a few experiments in robot geometry. I'm working on the This Much robot model mentioned in the previous post. My initial plan had been to have two separate arms, one on each side of the body, I now think I'm going to use a right-through single unit.
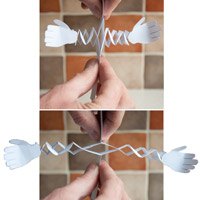
I had originally had difficulty getting the arms to pull in as the tabs, top and bottom, were pulled. I've changed some dimensions and it seems to have helped. To give some extra leverage I've extended the centre section (red arrow) it is now 50% longer than the next section (yellow). If you look closely you'll see that the remaining segments get gradually shorter and shorter, this should absorn=b any slack in the system.
It occurred to me that the finished model could also be used by fisherman as a fish exaggerator. I caught a fish t-h-i-s b-i-g!
How well does it work? This well!
