Reading though some back posts I came across the flexbot project that I had worked on some time ago. That project project eventually morphed into the flexiphant and scotch yoke mechanisms but it seems a shame to see the original idea go to waste. To that end I’ve dug out the files and am now working on a completed version.
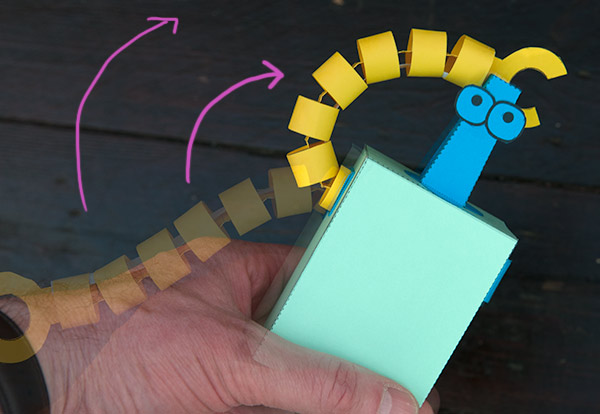
 The original stop-motion animation shows how the arms will work. Paper straps connected to the insides of the wrist and running through the length of the arm are pulled down lifting the arms as they do so.
The original stop-motion animation shows how the arms will work. Paper straps connected to the insides of the wrist and running through the length of the arm are pulled down lifting the arms as they do so.
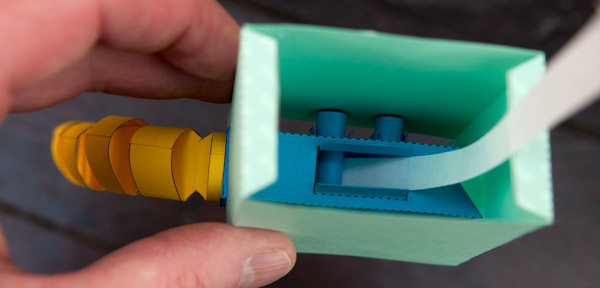
In the original mechanism I used a pair of bell cranks to change the direcion of pull.
In the new version I have run the paper straps over a
couple of paper pins as shown below. Far simpler to make.
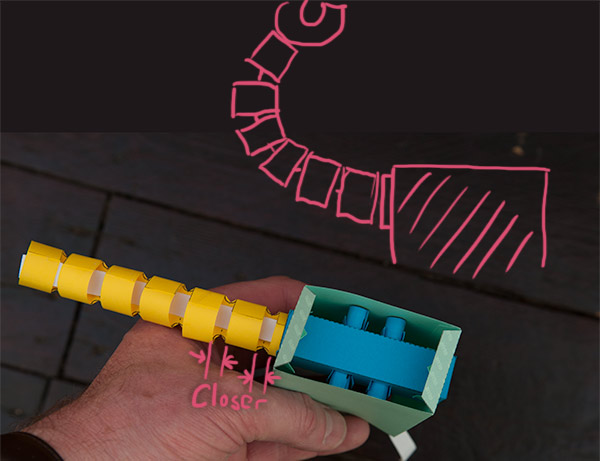
I’m changing the design of the arm in the next draft. In the current version the segments that make up the arm are all equally spaced. This in turn means that the angle of turn in each section is the same. I would prefer the parts nearer the body to flex less than the extremities. To that end, I’ll be closing up the gaps between the segments. The closer to the body, the smaller the gap.