

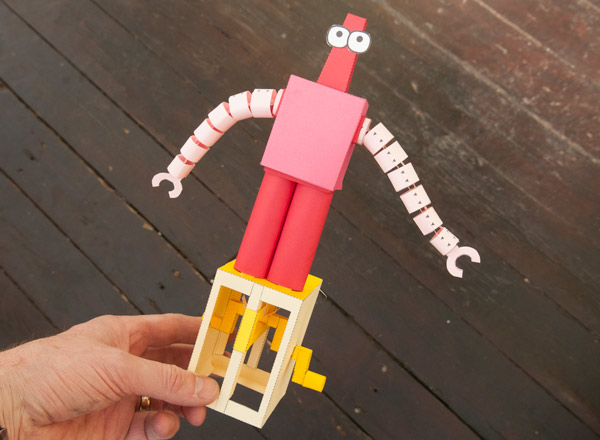
I’m in the final stages of designing the Flexibot model. As the handle on the side of the box is turned the arms lift up and down lifted by pulling on a paper belt. The box that the robot is standing on is based on the scotch yoke mechanism.
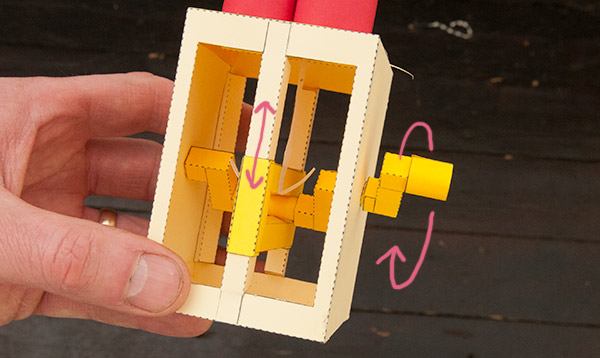
I’ve removed the central shaft from the original scotch yoke design as it is not needed. As the crank turns the yoke is lifted up and down.
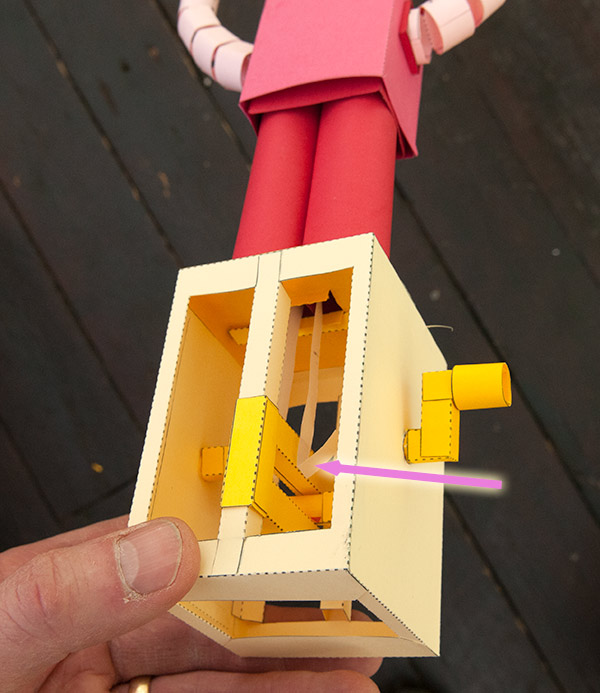 The paper belts that drive the arms are glued to the yoke. As the yoke moves down, the arms are pulled up. When the yoke returns to the top of its range the arms drop down again through gravity.
The paper belts that drive the arms are glued to the yoke. As the yoke moves down, the arms are pulled up. When the yoke returns to the top of its range the arms drop down again through gravity.

Looking good!
 There are a couple of changes I need to make before the model is complete including moving the robot further back on the box. It should be a cute little model when its done!
There are a couple of changes I need to make before the model is complete including moving the robot further back on the box. It should be a cute little model when its done!
