


Let's try something new. I'm working on the legs for the scotch robot. My original plan was to have a jointed two part leg but I thought, instead, that I'd have a go at a more flexible leg made up from short sections.

I put together six sections, each slightly smaller than the next.

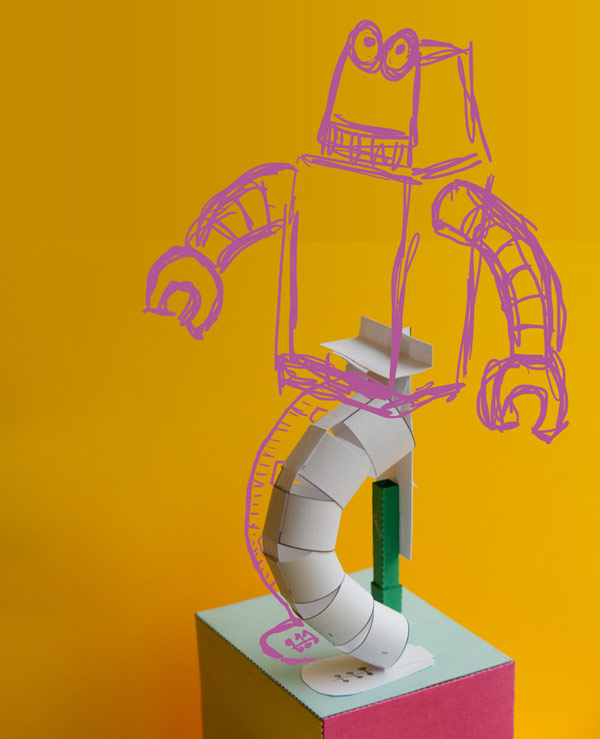
Here's a simple experimental jig connected to the scotch yoke mechanism. The foot is fastened to the box top and the top of the leg connected by a flexible joint to the vertical drive shaft.

With the drive shaft in its lowest position the leg curves nicely then straightens out again as the drive shaft reaches its the highest position.
It should go together something like this.
It might be possible to construct the arms in a similar way and move them with a couple of paper 'tendons'. More experiments required.
