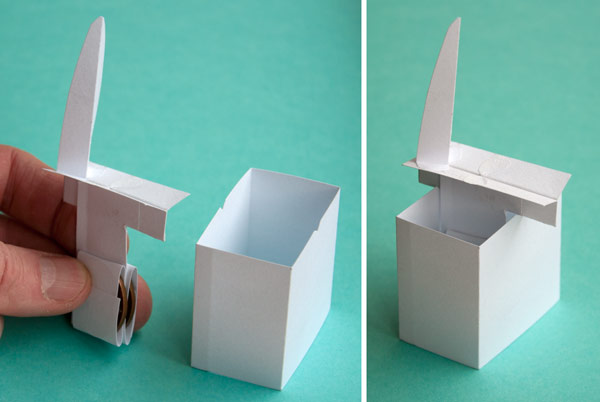
Continuing my experimentation with the power of pendulums, I'm trying out a wagging dog tail model.
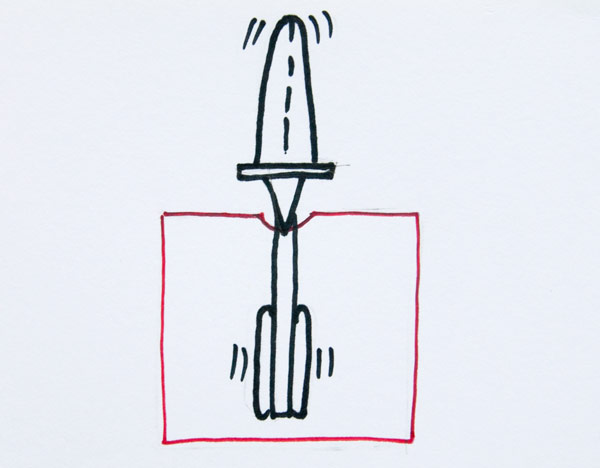
I've made a simple model using a couple of 25mm (2p) diameter coins as weights.
I've reduceded the length of the pendulum down to 50mm. That's the total length, right down to the bottom of the coin. I'm guessing that the effective length will be to the centre of gravity of the pendulum which should roughly in the middle of the coins. The shorter pendulum will mean that it cycles quicker.
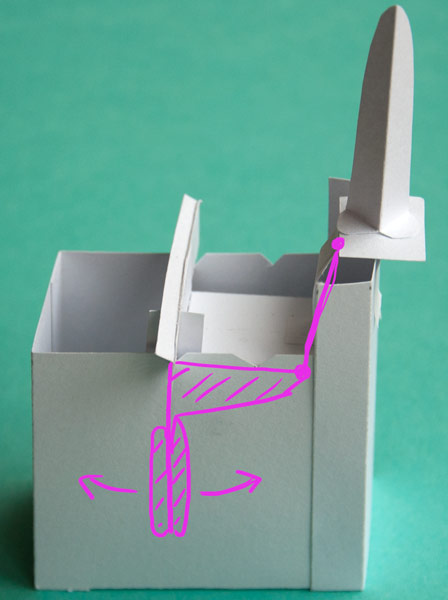
This model uses a knife edge pivot where the edge of a piece of card sits in a small recess. That way, friction is reduced to a minimum. The result is a model that runs for a good length of time although the swing back and forth, the amplitude, is not as great as it could be.
I thought I'd try magnifying the tail's movement by using a linkage.
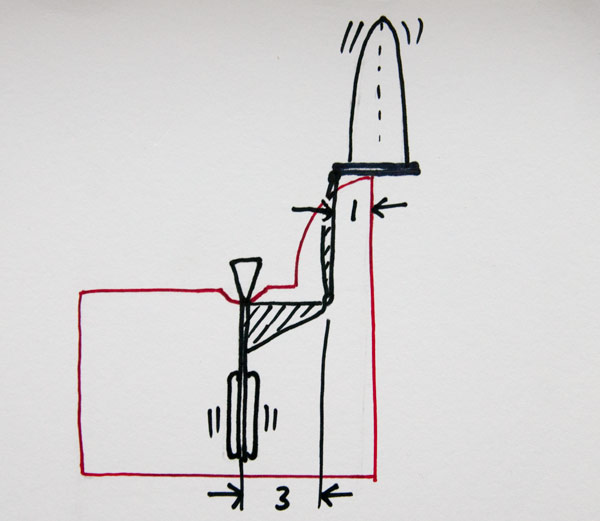
I've separated the pendulum and the tail. On the side of the pendulum there is a piece of card sticking straight out. On my prototype it is 24mm long.
I've made the platform that the tail sits on 16mm wide so the half way point is at 8mm. I then joined the two parts together with a straight link. So, the long piece is 24mm, the short piece 8mm, a ratio of 3:1. The tail should now move three times as far for the same distance moved by the pendulum.
And it works! The result is a really rather enthusiastic wag! I've whipped up a quick YouTube video so you can see it in action.
The next step will be to add the rest of the dog.