
 The crank slider mechansim is at the centre of many of the automata that I have designed. It is a versatile starting point which can create a range of different movements depending on how the various parts are laid out.
The crank slider mechansim is at the centre of many of the automata that I have designed. It is a versatile starting point which can create a range of different movements depending on how the various parts are laid out.
By changing the overall 'throw' of the crank the distance the end of the crank moves is changed. Even keeping the throw the same the movement of the end of the main push rod can vary. Changing the distance between the crank and the slider tube changes how rounded the movement is. When they are a long way apart the movement becomes almost straight up and down, close together the end point's movement is almost circular.
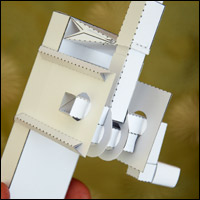
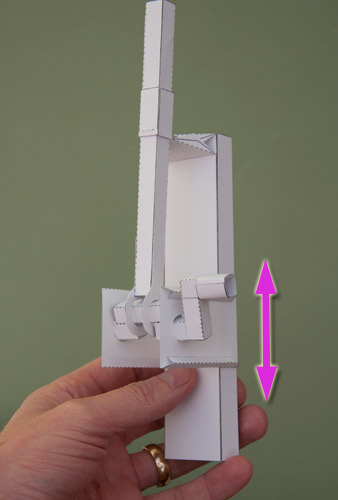
To demonstrate this I'm designing a experimental crank slider model that you can download and make, In this model the whole crank assembly can slide up and down the support letting you experiment with the movements created with different distances. The model is nearly done. Layout completion and colour tomorrow.
