

In the crab model I’ll be using a scotch yoke to pull the arm tendon. The scotch yoke mech-in-a-box moves up and down, the tendon pull is side to side. To change the pull angle by ninety degrees I’m using a bell crank.
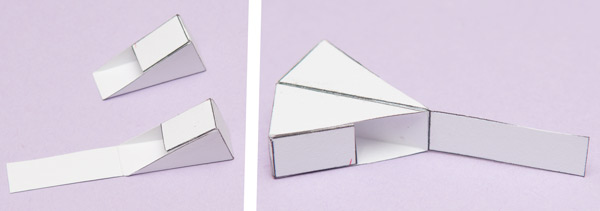
This bell crank is made from two thirty degree sections glued back to back.
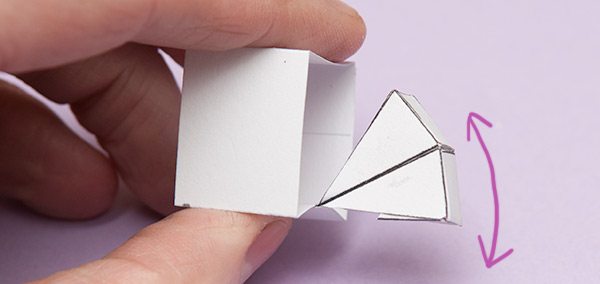
The bell crank fits onto the bottom of the arm socket where it is free to move up and down.
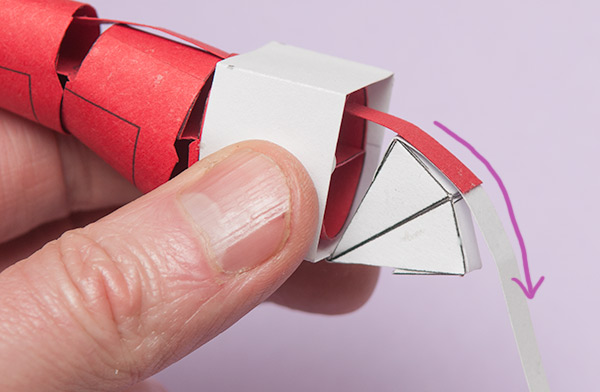
The arm fits in place in the arm socket and is held in place with glue. A long vertical tendon (white) is glued to the top edge of the bell crank. The arm tendon (red) is glued to the white tendon.
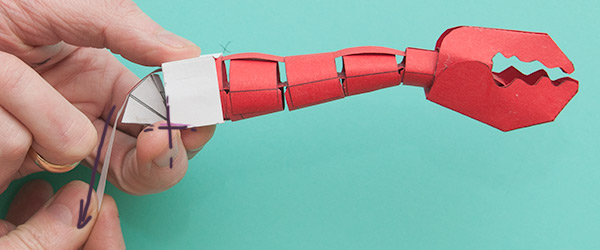
Pull the white tendon down, the motion is rotated by ninety degrees pulling the arm tendon sideways.
