

Experiments with tendon driven arms.
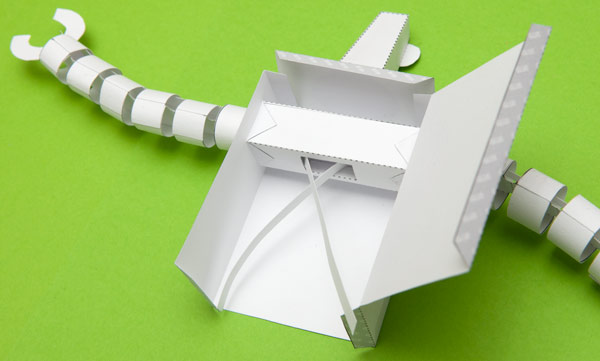
Two arms, connected to a body with tendons available to pull. I've used only a single tendon for each arm to pull the arm upwards. I'm relying on gravity to assist the return trip.
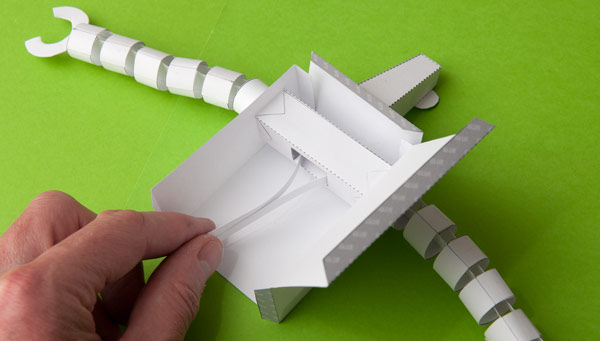
Pull both tendons at once to operate the arms.
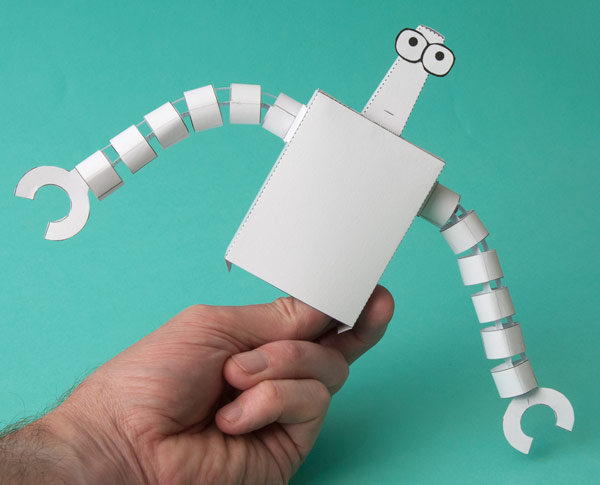
Down…
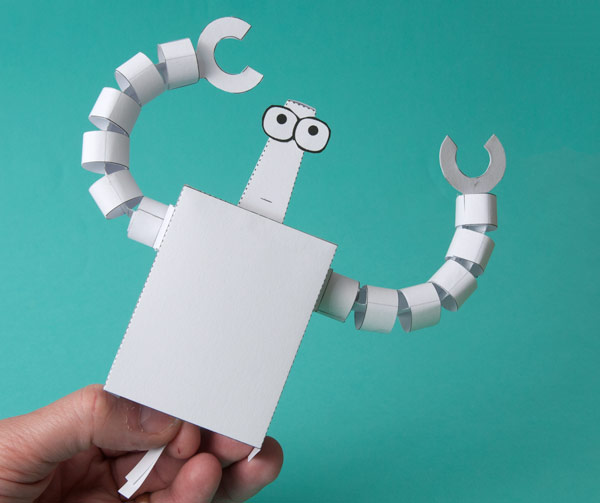
…and up!
Next step is to link the body to a box via a bush rod then join the tendons to the box top so that the arms go up and down as the robot does.
